
In the challenging environment of space, on-orbit assembly is a pivotal operation. The complexity of these assembly processes often involves manipulators interacting directly and frequently with objects. Traditional manipulator control, however, has shown limitations in adapting to diverse tasks and is susceptible to vibration, which can lead to assembly failure.
To overcome these hurdles, researchers at Beijing Institute of Technology have introduced an innovative solution: a human-like variable admittance control method. Their findings, published in *Cyborg and Bionic Systems* on September 6, 2023, suggest this approach significantly enhances the safety, robustness, and adaptability of robotic space assembly.
The utilization of robots for space maintenance and repair is growing due to their ability to withstand harsh space conditions compared to human astronauts. This shift is vital for advancing space technology by minimizing health risks to humans in space stations and addressing spacecraft repair challenges. Robotic assembly is an essential research area that has witnessed substantial progress, with compliance control being the key technique for enabling robots to execute complex assembly tasks.
Addressing the challenges of compliance control, researchers have explored various methods, including damping control, stiffness control, force/position hybrid control, and fuzzy adaptive control algorithms. These aim to augment the adaptability and efficiency of robots in assembly tasks, especially in unknown environments.
The researchers at Beijing Institute of Technology have taken inspiration from the human arm’s ability to adjust damping flexibly for stable and safe task execution. They established a dynamic data acquisition platform to capture human arm motion and analyzed the movement data to apply these characteristics to robots. “We use high-performance equipment to measure and analyze the obtained data,” commented Xiao Huang, a researcher at Beijing University of Technology.
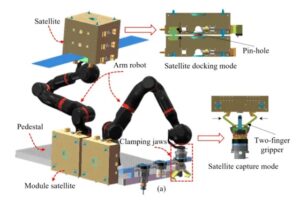
The research team, which includes Xiaolei Cao, Xiao Huang, Yan Zhao, Hui Li, and Zhihong Jiang from Beijing University of Technology, Zeyuan Sun from China Northern Vehicle Research Institute, Beijing; and Marco Ceccarelli from the University of Rome Tor Vergata, also identified three contact patterns for satellite assembly to enhance robotic control precision.
In their experiment, the team verified the effectiveness of the human-like variable parameter admittance controller through a ground experimental platform simulating space satellite assembly. This approach, according to Professor Zhihong Jiang, holds promising implications for the future of space exploration by improving mission efficiency, safety, and reliability.
However, the researchers acknowledge that further work is needed to achieve flexible assembly tasks on par with human capabilities and to develop robots that can endure the demanding conditions of space.
